Pretraga metodom A*
Među svim algoritmima pretraživanja grafova A* algoritam pronalazi cilj najbrže. Algoritam A* uz određene predpostavke objezbeđuje otvaranje najmanjeg broja čvorova uz nalaženje rješavajućeg puta minimalne cijene. Zato ga ponekad nazivaju optimalnim algoritmom.
Ime metoda se izgovara "A star" ili "A zvijezda", a autori (Peter Hart, Nils Nilsson i Bertram Raphael) su mu dali jer je nastao na osnovu ranijeg A1 algoritma, proširujući njegove mogućnosti i ostavljajući mogućnost proširenja na sve nove verzije (zato * da obuhvati sve buduće verzije i brojeve).
Funkcija g(n) predstavlja vrijednost cijene
puta od početnog čvora do čvora n. |
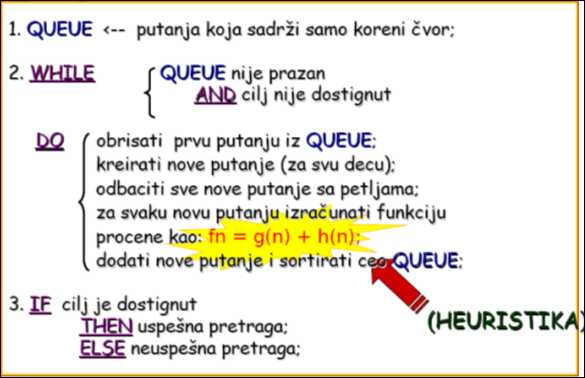
Pretraga se vrši tako što se kreće od početnog čvora i na svakom koraku sa lista raspoloživih čvorova bira se onaj čvor u kojem funkcija f ima najmanju vrijednost.
Na početku pretraživanja u početnom čvoru s, funkcija
f(s) ima vrijednost f(s)=0+h(s)=h(s). g(s)=0, jer je dužina puta 0.
Ako je procjena funkcije h tačna, onda funkcija f ne mijenja svoju
vrijednost u toku čitavog procesa pretraživanja sve do završnog čvora.
U toku pretraživanja pri prelasku na nove čvorove raste cijena puta
g(n), ali se zato smanjuje procjenjena cijena h(n) do završnog čvora.
Ako funkcija h ne daje tačne procjene, onda u toku pretraživanja
funkcija f može da mijenja vrijednosti
Funkcija g se koristi u slučaju da funkcija h nije dobro odabrana, kada
g preuzima dalje usmjeravanje pretrage.
Može se pokazati da je pretraživanje ovim algoritmom optimalno, tj. nalazi se optimalan rejšavajući put, ako funkcija h uvijek daje tačne procjene.
A* algoritam koristi OPEN listu na koju sprema one čvorove koji se mogu proširiti na svoje sljedbenike, krenuvši od startnog čvora.
Čvor s najmanjom vrijednošću funkcije f skida se s OPEN liste i proširuje njegovim sljedbenicima koji dolaze na OPEN listu. Svaki novi čvor koji dolazi na listu sadrži pokazivač na čvor kojeg je naslijedio. Budući da se s liste uvijek skida onaj čvor s najmanjom vrijednošću funkcije f, pretraživanje će biti fokusirano što bržem pronalaženju cilja. Algoritam je završen kada se na listi pojavi cilj, a optimalni je put određen praćenjem pokazivača na prethodni čvor krenuvši od cilja.
Slijedeći bilo koji put na stablu čvorova od korijena čvora, vrijednost funkcije f nikada se ne smanjuje. To je svojstvo ispunjeno samo ako je heuristička funkcija monotona. Može se pokazati da je heuristička funkcija monotona ako i samo ako posjeduje svojstvo nejednakosti trokuta (što zadovoljava euklidska udaljenost). U slučaju nenalaženja puta zbog zakrčenosti prostora preprekama između starta i cilja, algoritam će završiti s praznom listom.
|
function A*(start,goal)
closedset := the empty set
// The set of nodes already evaluated.
openset := {start}
// The set of tentative nodes to be evaluated, initially
containing the start node
came_from := the empty map
// The map of navigated nodes.
g_score[start] := 0
// Cost from start along best known path.
// Estimated total cost from start to goal through y.
f_score[start] := g_score[start] +
heuristic_cost_estimate(start, goal)
while openset is not empty
current := the node in openset having the lowest
f_score[] value
if current = goal
return reconstruct_path(came_from, goal)
remove current from openset
add current to closedset
for each neighbor in neighbor_nodes(current)
tentative_g_score := g_score[current] +
dist_between(current,neighbor)
tentative_f_score := tentative_g_score +
heuristic_cost_estimate(neighbor, goal)
if neighbor in closedset and tentative_f_score >=
f_score[neighbor]
continue
if neighbor not in openset or tentative_f_score <
f_score[neighbor]
came_from[neighbor] := current
g_score[neighbor] := tentative_g_score
f_score[neighbor] := tentative_f_score
if neighbor not in openset
add neighbor to openset
return failure |
copyright M2M
BL-2011/14